CMU 周衔:物理引擎 Genesis 的源启与未来丨具身先锋十人谈
文章摘要
【关 键 词】 生成式物理引擎、具身智能、开源项目、仿真平台、物理求解器
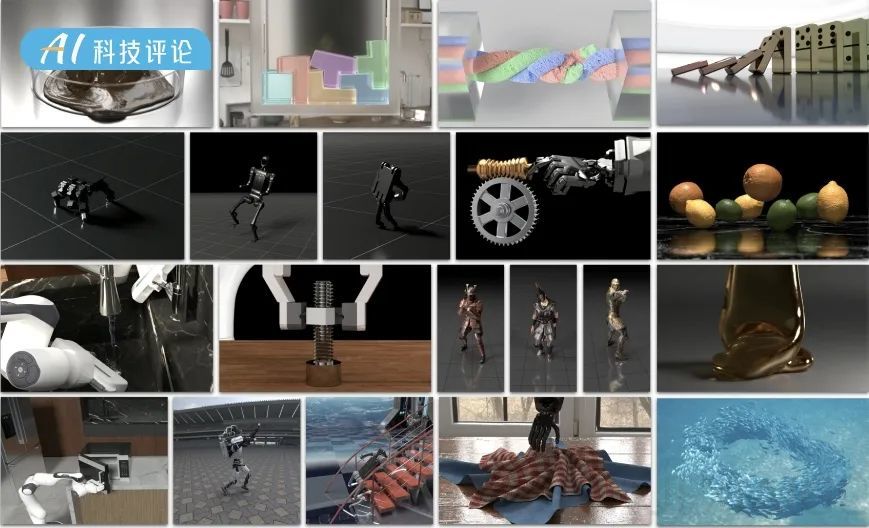
CMU联合18个研究机构开源发布了生成式物理引擎Genesis,引发具身智能领域的广泛关注。Genesis由12位青年华人学者组成的核心团队开发,项目领导者为CMU机器人研究所博士生周衔。该引擎从底层重新设计,集成多种物理求解器及其耦合,通过生成式智能体框架增强,旨在实现全自动数据生成。Genesis具备多个关键特点:原生Python开发、轻松安装、并行模拟速度快、支持先进物理求解器、逼真光线追踪渲染、可微性、物理精确的触觉传感器和原生支持生成式模拟。Genesis在单台RTX4090设备上的数据量可达实时的430000倍,26秒内训练出可迁移至现实世界的机器人运动策略,能生成4D物理世界。
尽管Genesis获得认可,但也有质疑声音对其精确度和速度表示怀疑。Genesis团队更新了技术报告,测评了各种场景下的速度对比,并开源了所有测试代码。周衔表示,Genesis将长期维护,打造成具身智能和物理AI最好用的仿真和数据平台,通过开源社区力量维护好底层平台。Genesis从仿真器演进为数据引擎,利用GPT等语言或视觉模型确定机器人有意义的任务和训练环境,通过编写代码生成奖励函数,构建起大语言模型在语言范畴对世界的认知以及在物理领域同世界的交互联系。Genesis的亮点在于易用性、速度与功能,易用性体现在API设计简洁,速度上比现有GPU加速机器人模拟器快一个多数量级,功能上集成各类物理求解器,支持多种物理性质物体求解。
周衔强调,Genesis的目标是打造一个完全透明、底层全开源、易于访问、理解和贡献的平台,让机器人领域人才和其他相关人员都能轻松参与。Genesis的可微分性是提供的一个有助于领域发展的重要特性,但并非主要优化方向。Genesis历时两年开发,最大的困难在于涉及多方面开发,个人专业知识无法覆盖全面,需要寻找各领域专业人士合作。周衔自学成为工程师,简化了用户体验,使每个功能都能通过一行代码调用,简单易用。
对于Genesis的质疑,周衔表示Genesis在速度上有很大优势,质疑报告中存在问题,有些是事实性错误和误导性设置。Genesis的物理引擎遵循Mujoco的约束,额外实现了GPU加速的碰撞检测,行为能和Mujoco完全保持一致。周衔认为,仿真和真机两条路都要走,仿真能提供大量数据,让机器人建立与物理世界交互的基本认知,真机在缩小与真实世界的差距以及处理复杂物理现象上有优势。Genesis将组建成熟的工程师团队长期运维,持续更新,打造成对机器人最友好的平台。
原文和模型
【原文链接】 阅读原文 [ 6542字 | 27分钟 ]
【原文作者】 AI科技评论
【摘要模型】 moonshot-v1-32k
【摘要评分】 ★★★★☆


相关文章




