模型信息
【模型公司】 Azure
【模型名称】 gpt-4-32k
【摘要评分】 ★★★★★
文章摘要
【关 键 词】 交通信号控制、大模型、LLMLight框架、LightGPT、可解释性
香港科技大学(广州)的研究团队提出了一个名为LLMLight的框架,用于实现交通信号控制(TSC)。该框架结合了大模型的泛化能力和人类直觉的推理和决策过程,以实现有效的交通控制。在九个交通流数据集上的实验证明了LLMLight框架的有效性、泛化能力和可解释性。
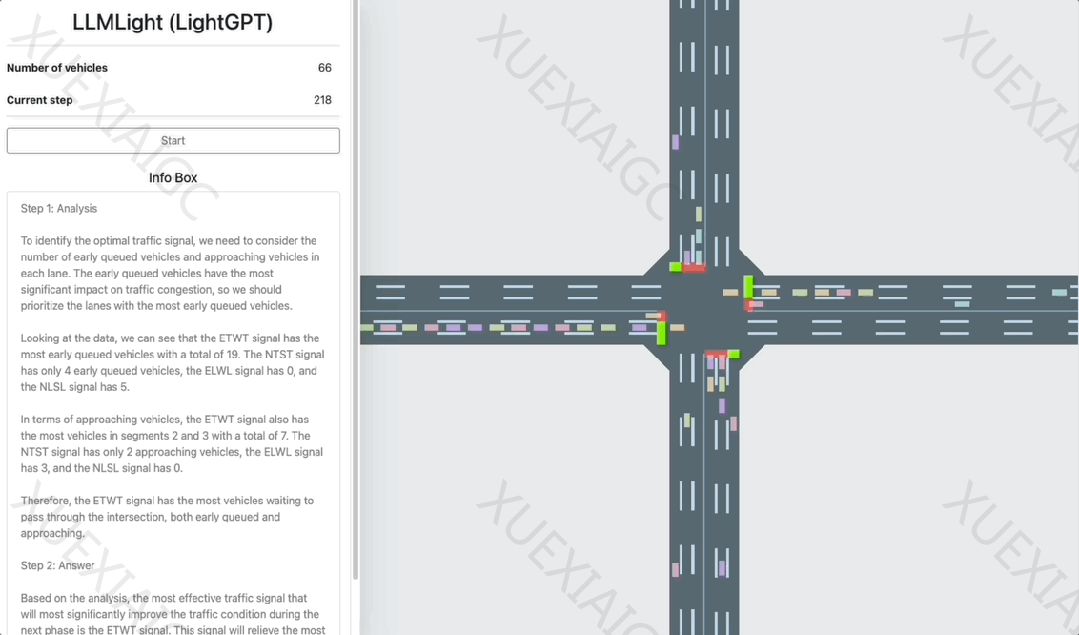
LLMLight框架的关键在于,它将TSC视为部分可观察的马尔可夫博弈,其中每个大语言模型(LLM)智能体管理一个十字路口的交通灯。在每个信号切换时间步上,智能体都会收集目标路口的交通状况,并将其转换为人类可读的文本作为实时观察。此外,该研究还结合了信息量丰富的任务描述及一条与控制策略有关的常识知识,以帮助LLM理解交通管理任务。
为了应对LLM应用于TSC的挑战,研究人员提出了LLMLight框架,其旨在整合大语言模型作为智能体,实现交通信号灯控制。该研究还构建了一个交通信号灯控制垂类大模型LightGPT来增强LLMLight框架。一方面,提出了模仿学习微调,让学生LLM学习GPT-4产生的高质量决策和推理轨迹。另一方面,引入了一个由评论家模型指导的策略优化过程,使其评估和改进LLM智能体的控制。
实验结果表明,配备了LightGPT的LLMLight在所有基准测试中始终达到了SOTA或与经典方法同等的性能水平。尽管最先进的强化学习方法在某些数据集上表现优于LLMLight(LightGPT),但LLMLight(LightGPT)仅利用当前路口的观测特征就展现出强有竞争的结果,表明了其决策显著的有效性。
LLMLight不仅在制定有效的控制策略方面表现出色,而且还能为每个决策提供其背后的详细解释。这一独特特征增强了LLMLight的透明度和可解释性,有助于研究人员更全面地理解其决策行为。
最后,研究人员表示,LLMLight的下一步研究将着眼于融合多模态信息及群体协同。多模态大模型可以直接从端到端地提取路口的交通拥堵信息,使模型能够自行探索可用的视觉特征,进而自我优化出更优的决策。而群体协同则能够实现临近路口、车辆和智能体之间的信息交换,从而获得全局信息,最终达到优化整体路网的交通效率的目的。
原文信息
【原文链接】 阅读原文
【阅读预估】 4466 / 18分钟
【原文作者】 量子位
【作者简介】 追踪人工智能新趋势,关注科技行业新突破

相关文章



