文章摘要
BodyGen 框架通过结合强化学习与深度神经网络技术,实现了机器人形态与控制策略的自主协同设计,为具身智能的加速进化提供了全新的思路。该框架由蚂蚁数科与清华大学联合团队提出,并在 ICLR 2025 顶会上入选 Spotlight 论文。研究团队通过实验证明,机器人能够在极短时间内自动演化出适应当前环境的最优形态及控制策略,这一成果为解决机器人设计中的复杂问题提供了创新性方案。
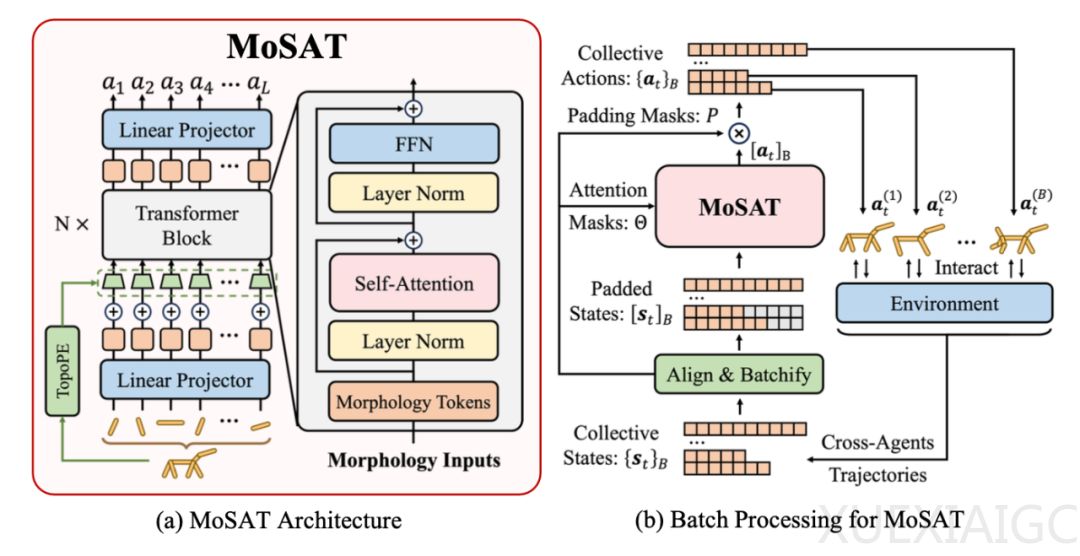
BodyGen 的核心技术包括轻量级的形体结构位置编码器 TopoPE、基于 Transformer 的集中式神经中枢处理网络 MoSAT 以及时序信用分配机制下的协同设计。TopoPE 通过哈希映射为机器人肢体赋予唯一嵌入,解决了形体演化中的索引偏移问题,促进了相似形态机器人的知识对齐和共享。MoSAT 则作为机器人的“大脑中枢”,集中处理来自各个关节的信息,并通过 Transformer 网络实现高效的信息交互与动作生成。时序信用分配机制则通过改进的广义优势估计(GAE),动态分配环境奖励,使智能体在形态设计和控制阶段获得平衡的优势估计,从而提升训练性能。
实验表明,BodyGen 在 10 种不同任务环境下,相较于现有最优方法实现了 60.03% 的平均性能提升。研究团队选取了线性、双腿和四腿三种基础机器人拓扑结构,在不同仿真环境中进行测试,结果显示 BodyGen 生成的机器人形态在环境适应性评分上显著优于其他方法。此外,BodyGen 的平均参数量仅为 1.43M,相较于其他基线算法更加轻量级,显著降低了计算成本和存储需求,提升了训练的稳定性与效率。
BodyGen 的应用潜力广泛,包括环境适应性机器人设计、仿生机器人研究以及虚拟人物动作生成等领域。该框架能够针对特定环境需求,快速生成最优形态与控制策略,显著缩短机器人设计周期,提升开发效率。同时,通过模拟生物运动机理,BodyGen 为探索生物运动原理提供了可计算平台,并为游戏、动画制作及虚拟角色行为生成提供了技术支持。
未来,团队计划通过物理模拟迁移技术推动 BodyGen 在实际场景中的应用。随着计算能力的提升,这一框架有望成为实现通用具身智能的重要路径,使机器人能够通过感知 – 行动闭环持续优化形态与行为策略,逐步实现自我设计与自动进化。相关代码已开源至 GitHub 仓库,供开发者尝试与应用。
原文和模型
【原文链接】 阅读原文 [ 2749字 | 11分钟 ]
【原文作者】 AI前线
【摘要模型】 deepseek-v3
【摘要评分】 ★★★★★


相关文章




