机器人领域首个开源视觉-语言操作大模型,RoboFlamingo框架激发开源VLMs更大潜能
作者信息
【原文作者】 机器之心
【作者简介】 专业的人工智能媒体和产业服务平台
【微 信 号】 almosthuman2014
文章摘要
【关 键 词】 RoboFlamingo、多模态、语言交互、机器人操作、开源框架
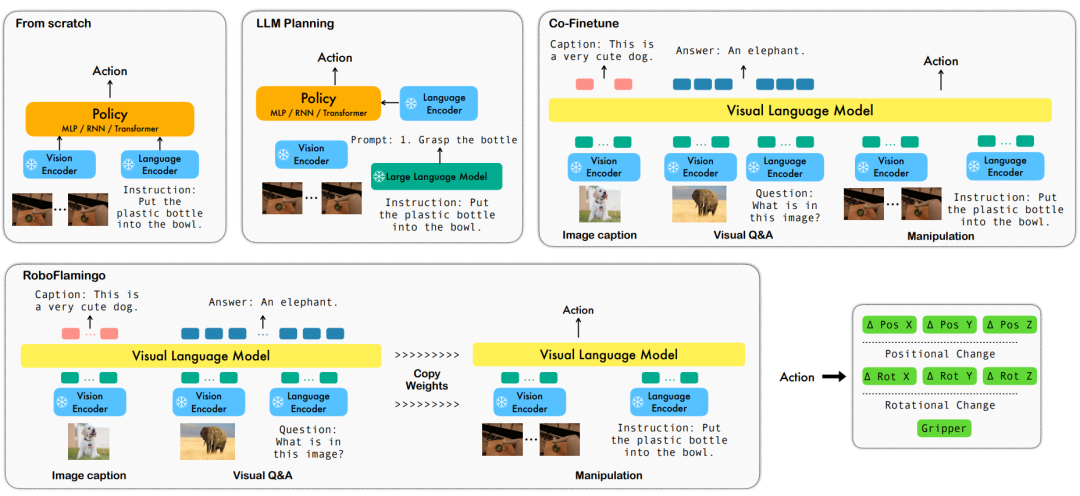
这篇文章介绍了ByteDance Research基于开源的多模态语言视觉大模型OpenFlamingo开发的RoboFlamingo机器人操作模型。
RoboFlamingo通过简单微调就能适应于语言交互的机器人操作任务,并在机器人操作数据集CALVIN上取得了SOTA的性能。
文章详细介绍了RoboFlamingo的研究背景、方法、实验结果和定性结果,并对其进行了总结。
该工作为语言交互的机器人操作策略提供了一个新颖的基于现有开源VLMs的框架,为机器人技术研究者提供了一个强大的开源框架,能够更容易地发挥开源VLMs的潜能。
原文信息
【原文链接】 阅读原文
【原文字数】 2083
【阅读时长】 7分钟
© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章

暂无评论...




