文章摘要
【关 键 词】 人形机器人、双臂协同、灵巧操作、AI技术、控制框架
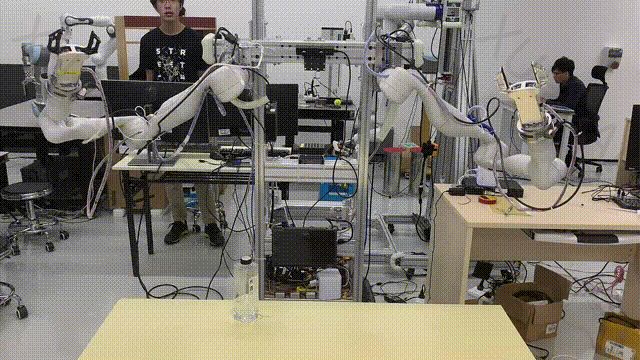
腾讯Robotics X实验室在人形双臂机器人系统领域取得了新突破,成功开发出一种通用双臂协同灵巧操作框架。这一成果已在机器人领域的顶级期刊《IEEE Transactions on Robotics》上发表。该实验室的机器人系统能够执行多种复杂任务,如拧瓶盖、倒水、安装显示屏和搬运大箱子,展现出与真人相似的灵活性和稳定性。
为了实现这一通用化双臂系统,腾讯Robotics X实验室解决了三个关键共性问题:基于视觉感知实现未知物体的双臂协同最优抓取、确保双臂机器人在动态协同过程中的系统安全性,以及将丰富的人类技能转移到有限跟踪接口类型的机器人系统中。
实验室提出了两个相互耦合的子框架:灵巧可达感知子框架和多功能控制子框架。灵巧可达感知子框架通过端到端评估网络和机器人可达性概率化建模,实现了对未建模物体的最优协同抓取。多功能控制子框架则采用层级化的多优先级优化框架,实现了高精度双臂避自碰和高拟真双臂操作度椭球跟踪。
在技术细节方面,灵巧可达感知子框架包括双臂灵巧感知抓取数据集、双臂协同抓取质量评估网络和双臂可达性建模与最优抓取分配。研究人员创建了业界首个大规模灵巧性感知的双臂抓取合成数据集(DA2 Dataset),并设计了面向双臂协同抓取的质量评估网络Dual-PointNetGPD。此外,通过单位四元数高斯混合模型,实现了双臂抓取可达性与抓取灵巧性评估的融合统一。
多功能协同操作控制子框架则包括双臂高精度避自碰、基于黎曼几何的双臂协同操作度椭球跟踪,以及多优先级优化与控制器设计。研究人员提出了一种基于主动学习的采样方法,用于生成双臂碰撞数据集,并通过机器学习的方式高效获取高精度的最小距离代理函数。此外,通过设计流形空间中的速度前馈项,实现了双臂操作度椭球的实时跟踪。
通过一系列实验,研究人员验证了所提出框架的有效性。结果表明,该系统在感知层、双手抓取、协同操作规划和底层控制等方面提供了丰富的接口,具有很高的通用性、可扩展性和兼容性。这一研究有助于弥合AI与Robotics之间的技术鸿沟,提升基于AI生成的操作策略在物理世界中执行的稳定性和可靠性,加速双臂系统全自主通用化的到来。
原文和模型
【原文链接】 阅读原文 [ 3641字 | 15分钟 ]
【原文作者】 量子位
【摘要模型】 moonshot-v1-32k
【摘要评分】 ★★★★★


相关文章


