无人机:不是我想长腿,《Nature》论文说这样更省力
文章摘要
【关 键 词】 无人机、仿生设计、跳跃起飞、节能高效、智能系统
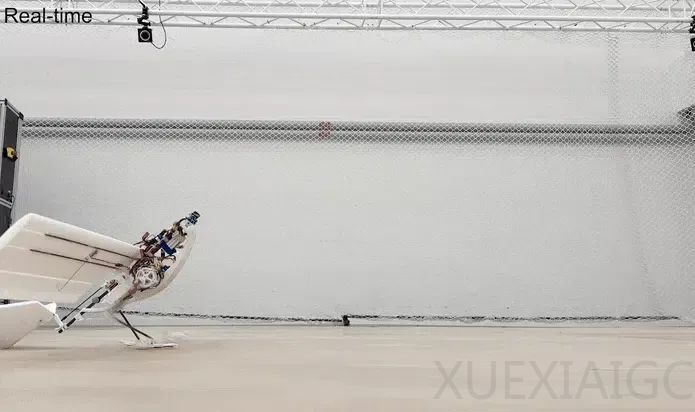
瑞士洛桑联邦理工学院(EPLF)的智能系统实验室博士生Won Dong Shin在《Nature》杂志上发表了一篇论文,探讨了鸟类通过跳跃起飞的机制,并将其应用于固定翼无人机的设计。Shin开发的RAVEN无人机采用仿生鸟腿设计,使得无人机能够像乌鸦一样跳跃起飞,并在地面上灵活移动。这种设计不仅提高了无人机的起飞效率,还增加了其在地面的移动能力。
RAVEN无人机的多功能腿部设计使其更接近真实鸟类,通过模仿大自然的智慧,如弹簧式的“人造肌腱”和灵活抓握的机械脚趾,RAVEN能够轻盈地行走和跳跃。RAVEN的翼展为100厘米,机身长50厘米,能够以每4秒1米的速度行走,跨越12厘米的缝隙,并能跳上26厘米高的障碍物。在跳跃起飞时,RAVEN的腿部能将其推送到近半米的起始高度,并达到2.2米/秒的起速。
与传统固定翼无人机相比,RAVEN的跳跃起飞能量效率比静态起飞高出约10倍。研究人员还测试了非跳跃起飞的效果,发现其飞行极不稳定。此外,RAVEN的腿部设计还有助于降落,通过感知系统计算和预测降落轨迹、时机和姿态。
尽管RAVEN的设计灵感来源于鸟类,但其扩展到更大型无人机上仍面临挑战。Shin表示,超过一定体型的鸟类无法通过跳跃起飞,因此如何让这一设计适用于更大型、能够承载有效载荷的无人机仍是一个问题。目前,研究团队正在开发一套视觉系统,用于避障和降落,同时也在研究能够让无人机通过狭窄缝隙的折叠翼。Shin还希望为RAVEN加入可以拍打翅膀的扑翼设计,使无人机的运动方式更接近鸟类。
原文和模型
【原文链接】 阅读原文 [ 1691字 | 7分钟 ]
【原文作者】 机器之心
【摘要模型】 moonshot-v1-32k
【摘要评分】 ★★★☆☆


相关文章




