具身智能新高度!智元机器人推出全球首个4D世界模型EnerVerse
文章摘要
【关 键 词】 具身智能、动作规划、自回归、稀疏记忆、自由锚定
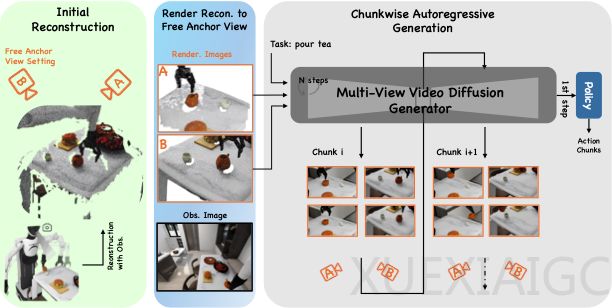
智元机器人团队针对具身智能领域的核心科学问题,即如何让机器人在任务指引和实时观测的基础上规划未来动作,提出了EnerVerse架构。该架构通过自回归扩散模型生成未来具身空间,引导机器人完成复杂任务。EnerVerse架构创新性地引入了稀疏记忆机制和自由锚定视角(FAV),在提升4D生成能力的同时,实现了动作规划性能的显著突破。实验结果表明,EnerVerse在机器人动作规划任务中实现了当前最优(SOTA)表现。
EnerVerse通过逐块生成的自回归扩散框架,结合创新的稀疏记忆机制与自由锚定视角(FAV)方法,解决了现有方法在应对复杂具身任务时的局限性。稀疏记忆机制借鉴大语言模型(LLM)的上下文记忆,有效降低计算开销,同时显著提升长程任务的生成能力。自由锚定视角(FAV)方法支持动态调整锚定视角,克服固定多视角在狭窄场景中的局限性。
EnerVerse通过在生成网络下游集成Diffusion策略头,打通未来空间生成与机器人动作规划的全链条。生成网络在逆扩散的第一步即可输出未来动作序列,确保动作预测的实时性。在LIBERO基准测试中,EnerVerse在机器人动作规划任务中取得显著优势。
EnerVerse架构开创了未来具身智能的新方向。通过未来空间生成引导动作规划,EnerVerse不仅突破了机器人任务规划的技术瓶颈,还为多模态、长程任务的研究提供了全新范式。项目主页与论文已上线,模型与相关数据集即将开源。
原文和模型
【原文链接】 阅读原文 [ 1993字 | 8分钟 ]
【原文作者】 机器之心
【摘要模型】 moonshot-v1-32k
【摘要评分】 ★★☆☆☆

© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章

暂无评论...



