从空间智能到具身智能,跨维践行Sim2Real AI最高效路径
文章摘要
【关 键 词】 具身智能、Sim2Real AI、空间智能、跨维智能、通用机器人
随着具身智能的兴起,数据成为了AI发展的关键资源。然而,通用具身智能面临的主要挑战之一是数据的匮乏。Sim2Real AI技术被认为是实现具身智能的有效途径,通过物理仿真和合成数据来弥补真实数据的不足。香港中文大学(深圳)的贾奎教授认为,Sim2Real AI是实现具身智能的最高效路径。
贾奎教授指出,空间智能和具身智能是近年来受到广泛关注的领域。空间智能涉及个体在三维物理空间及四维时空中的认知和推理能力,而具身智能则要求智能系统具备物理形态,并通过这个形态与环境进行交互。具身智能的本质是学习并泛化技能空间,实现类似人类的通用人工智能。
在实现具身智能的过程中,贾奎教授强调了建立“世界模型”的重要性,即让机器人具备类似人类感知的“灵性”。这需要建立能够对空间几何与物理过程进行精准建模、理解与推理的“世界模型”,使机器人传感器具备人类感知的能力。
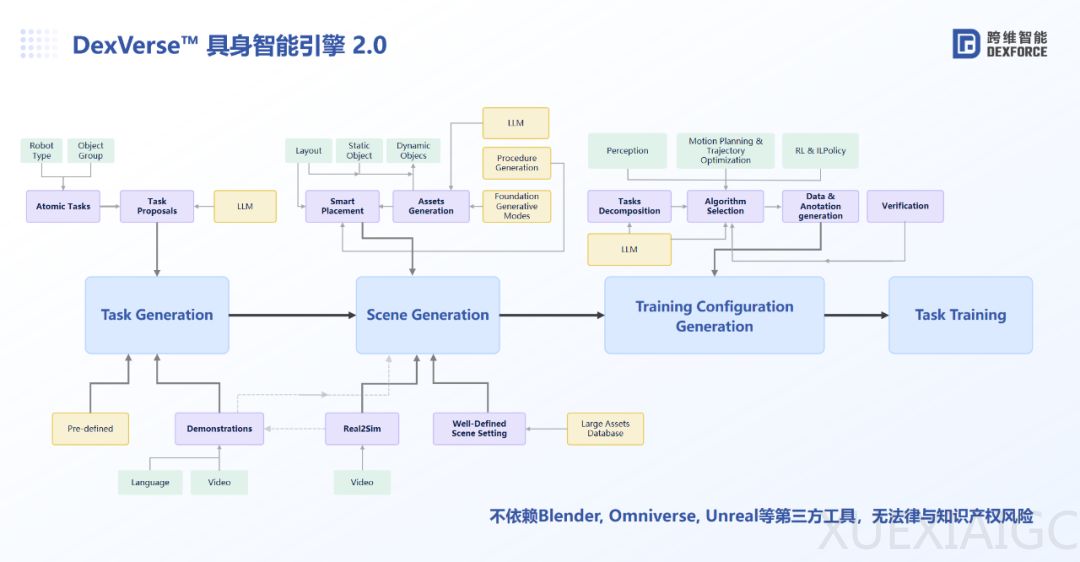
跨维智能公司通过自研的DexVerse™空间与具身智能引擎,实现了物理仿真、数据合成、模型训练的全链条自动化。这一引擎能够针对具体的商业场景,形成空间与具身智能大模型套件及纯视觉智能传感器,为通用机器人提供智慧的大脑和双眼。跨维已经在多个商业场景中实现了以100%的合成数据,在毫米/亚毫米的操作精度要求下,达到99.9%以上的任务成功率。
贾奎教授认为,实现通用空间与具身智能比实现大语言模型的通用性更难。空间智能需要从传感器获取的原始信号中学习,而具身智能则需要学习由机器人本体和操作对象共同定义出的机器人“技能空间”。Sim2Real AI通过物理仿真和合成数据,可以更高效地覆盖各种操作情况,实现具身智能。
跨维智能公司通过DexVerse™具身智能引擎,已经建立了服务智能制造、智慧农业等应用场景的场景任务理解、数字资产生成、数据仿真生成、AI模型训练等全链条能力,并形成了包括智能视觉传感器、PickWiz软件、复合机器人等具身智能产品。跨维已完成具身智能L1阶段的发展,正在稳健地迈向L2级。
贾奎教授认为,通用机器人终局生态链由人形本体厂商、零部件厂商、视触力等传感器厂商、具身智能芯片与方案供应商等组成。跨维DexVerse™具身智能引擎在产业链去往终态的过程中,将发挥决定性作用,通过Sim2Real AI全链条能力,以终为始,从商业闭环的方式推动具身智能机器人在硬件构型、传感器选型、数据模态范式及多模态大模型等方面统一标准。跨维将首先赋能相对成熟的移动/轮足底盘+双机械臂的具身智能本体,并最终与人形机器人本体厂商形成合力,实现通用具身智能的广泛落地。
原文和模型
【原文链接】 阅读原文 [ 5747字 | 23分钟 ]
【原文作者】 机器之心
【摘要模型】 moonshot-v1-32k
【摘要评分】 ★★★★★


相关文章




