专访 OmniH2O 项目发起人何泰然:探索人形机器人遥操作通向具身智能的可行之路
文章摘要
【关 键 词】 人工智能、人形机器人、遥操作技术、具身智能、OmniH2O项目
何泰然博士在人工智能领域具有远大的抱负和决心,致力于探索人形机器人遥操作的可行路径。遥操作,即通过设备远程操控机器人,是机器人公司收集训练数据、实现自动化学习的关键环节。
人工智能自2015年实现从感知智能到认知智能的重大转变,深度学习技术的飞跃为人形机器人的感知、决策和交互能力提升奠定了算法基础。
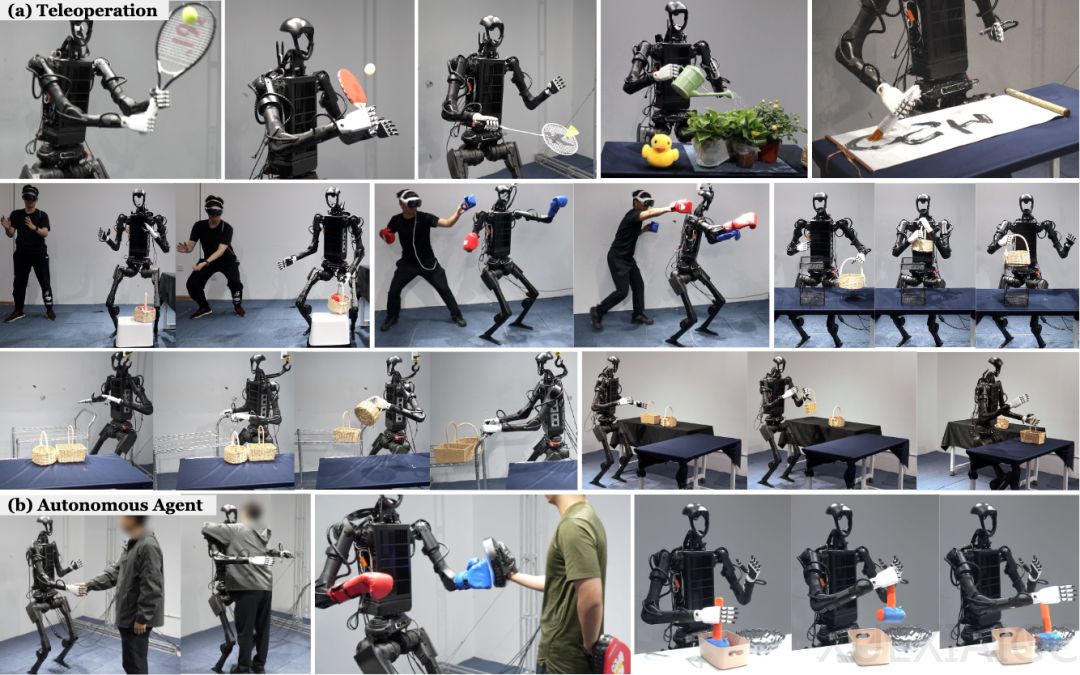
何泰然领导的OmniH2O项目在卡内基梅隆大学孵化,展示了全尺寸人形机器人的全身遥控和自主学习能力。
项目基于学习的方法,使用运动学姿势作为控制接口,实现多种方式控制人形机器人。
项目还发布了OmniH2O-6数据集,包含六个日常任务,展示人形机器人全身技能的学习能力。
何泰然认为,遥操作和自主学习之间的边界模糊,本质上遥操作是为实现自主学习。
何泰然对遥操作的兴趣源于童年时期观看的科幻电影《铁甲钢拳》。
OmniH2O项目的数据集包含六个任务,如打拳击、玩石头剪刀布、下蹲躲避障碍物、抓取物体放置和扔垃圾等。
何泰然认为应将问题拆分,使用优秀的interface(如VR)进行遥操作,下游采用追踪策略追踪人类动作。
何泰然对与工业界合作持开放态度,认为人形机器人遥操作是不可或缺的部分。
总之,何泰然博士的OmniH2O项目在人形机器人遥操作领域取得了显著成果,为具身智能的发展提供了新思路和方法。
原文和模型
【原文链接】 阅读原文 [ 5534字 | 23分钟 ]
【原文作者】 AI科技评论
【摘要模型】 moonshot-v1-32k
【摘要评分】 ★★★★★

© 版权声明
文章版权归作者所有,未经允许请勿转载。

相关文章

暂无评论...



