一场不可错过的辩论:大模型能带来通用机器人吗?
文章摘要
【关 键 词】 大模型、机器人行业、数据挑战、算力消耗、研究探索
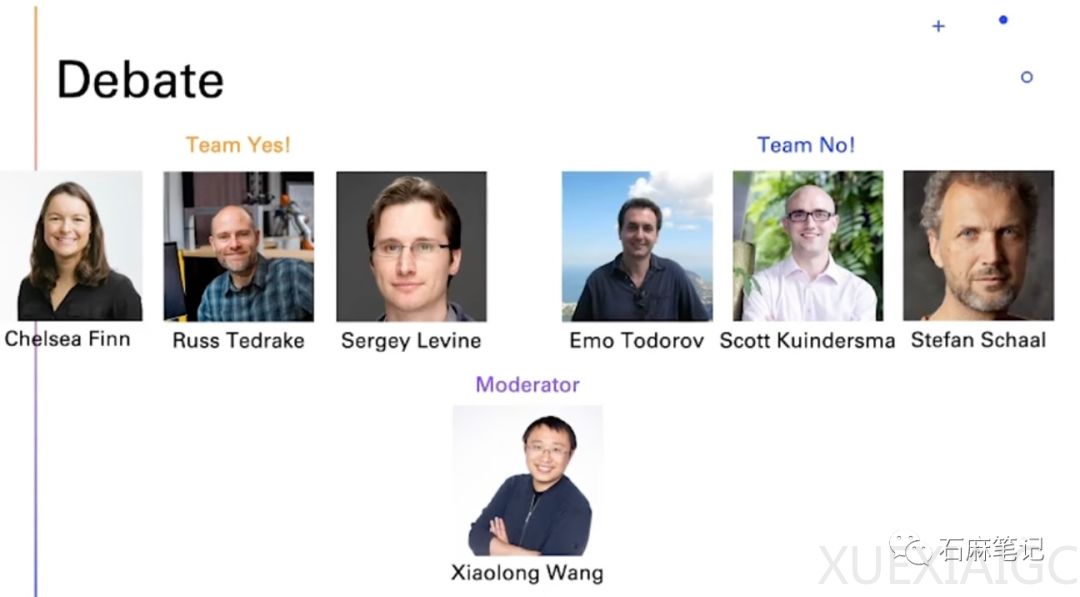
2023年11月,一场关于大模型和具身智能的讨论引起了业界的广泛关注。这场讨论的核心问题是:大模型方法是否适用于机器人行业。正方辩手包括Sergey Levine、Chelsea Finn和Russ Tedrake,他们认为通过在非常大的数据集上训练大型神经网络可以解决机器人问题。他们指出,在计算机视觉(CV)和自然语言处理(NLP)领域,大模型已经取得了显著的成果,这种方法同样适用于机器人领域。他们还强调,数据、算力和基础模型的进展为机器人行业带来了新的机遇。
然而,反方辩手Scott Kuindersma、Stefan Schaal和Emo Todorov则认为,大模型方法在机器人领域的应用面临诸多挑战。首先,目前缺乏大规模的机器人数据集,且收集这些数据需要巨大的时间和金钱投入。其次,机器人的多样性和人类环境的复杂性使得数据收集变得更加困难。此外,训练大型模型需要消耗大量的算力和能源,这对于学术实验室来说是不切实际的。更重要的是,机器人任务对可靠性的要求极高,而现有的机器人学习算法尚未达到这一水平。
在这场辩论中,双方还提出了一些其他相关论点。例如,一些专家认为,可以通过模拟环境训练机器人策略,然后将其转移到现实世界,或者利用现有的视觉、语言和视频数据进行微调。此外,将基于模型的控制和基于学习的方法结合起来,可能是实现可靠现实世界系统的最佳途径。尽管存在争议,但大多数人认为,在机器人学习中进行大模型尝试是一个有前途的方向。
值得注意的是,这场辩论不仅仅是学术界的讨论,它还反映了当前中国创投圈、机器人产业圈和学术圈的现实情况。随着具身智能成为热门赛道,各种项目和投资纷纷涌入这一领域。然而,我们需要认识到,机器人学习领域仍面临许多挑战,需要更多的研究和探索。
总的来说,大模型方法在机器人领域的应用前景仍然存在争议。虽然这种方法在CV和NLP领域取得了成功,但在机器人领域,我们需要克服数据收集、算力消耗和可靠性等方面的问题。同时,我们也应该关注其他研究方向,如基于模型的控制和人机协同系统,以实现更广泛的应用和部署。
原文和模型
【原文链接】 阅读原文 [ 7014字 | 29分钟 ]
【原文作者】 Founder Park
【摘要模型】 moonshot-v1-32k
【摘要评分】 ★★★★★


相关文章


